XArm6 with Robotiq Gripper and Wrist Camera#
Robot UID: xarm6_robotiq_wristcam
Agent Class Code: mani-skill/ManiSkill
Quality: A (Values are realistic, but have not been properly identified)
Degrees of Freedom: 12
Controllers: pd_joint_delta_pos, pd_joint_pos, pd_ee_delta_pos, pd_ee_delta_pose, pd_ee_pose, pd_joint_target_delta_pos, pd_ee_target_delta_pos, pd_ee_target_delta_pose, pd_joint_vel, pd_joint_pos_vel, pd_joint_delta_pos_vel
Visuals and Collision Models#
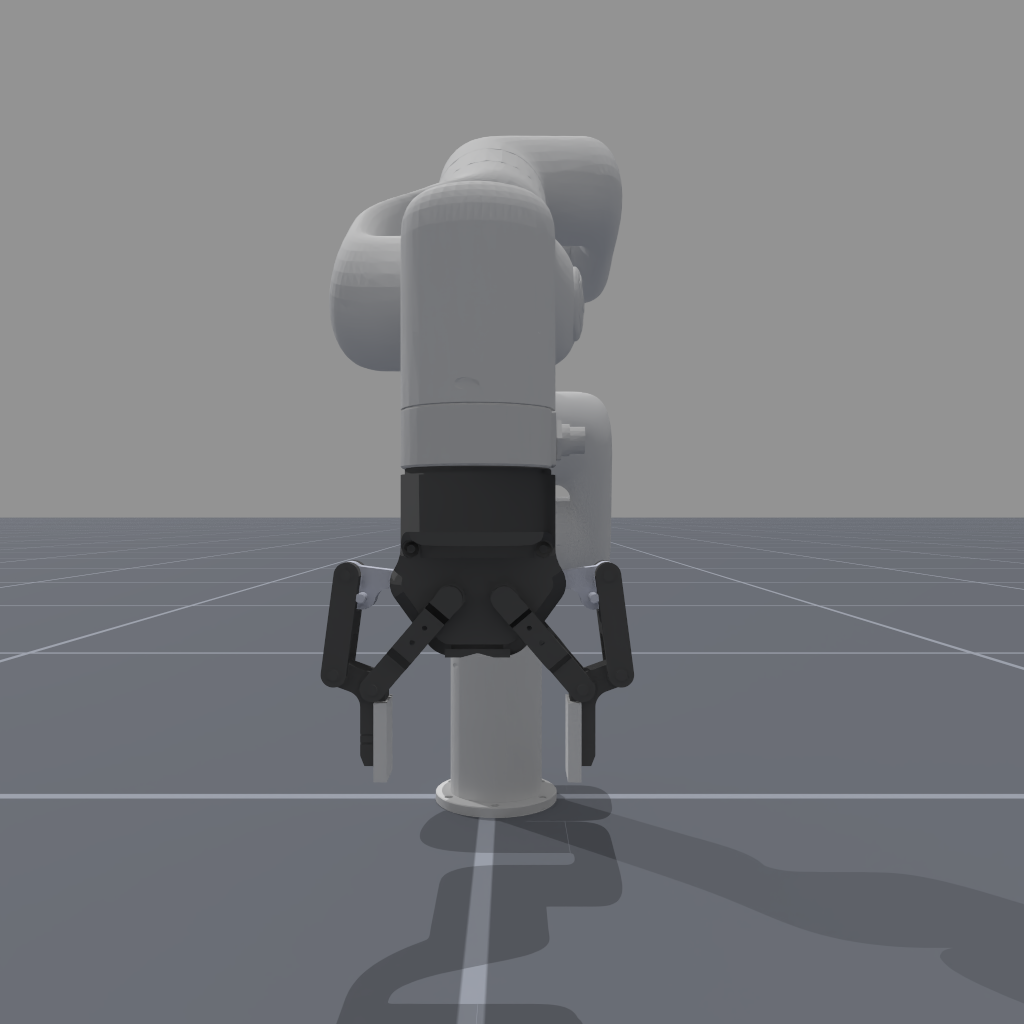
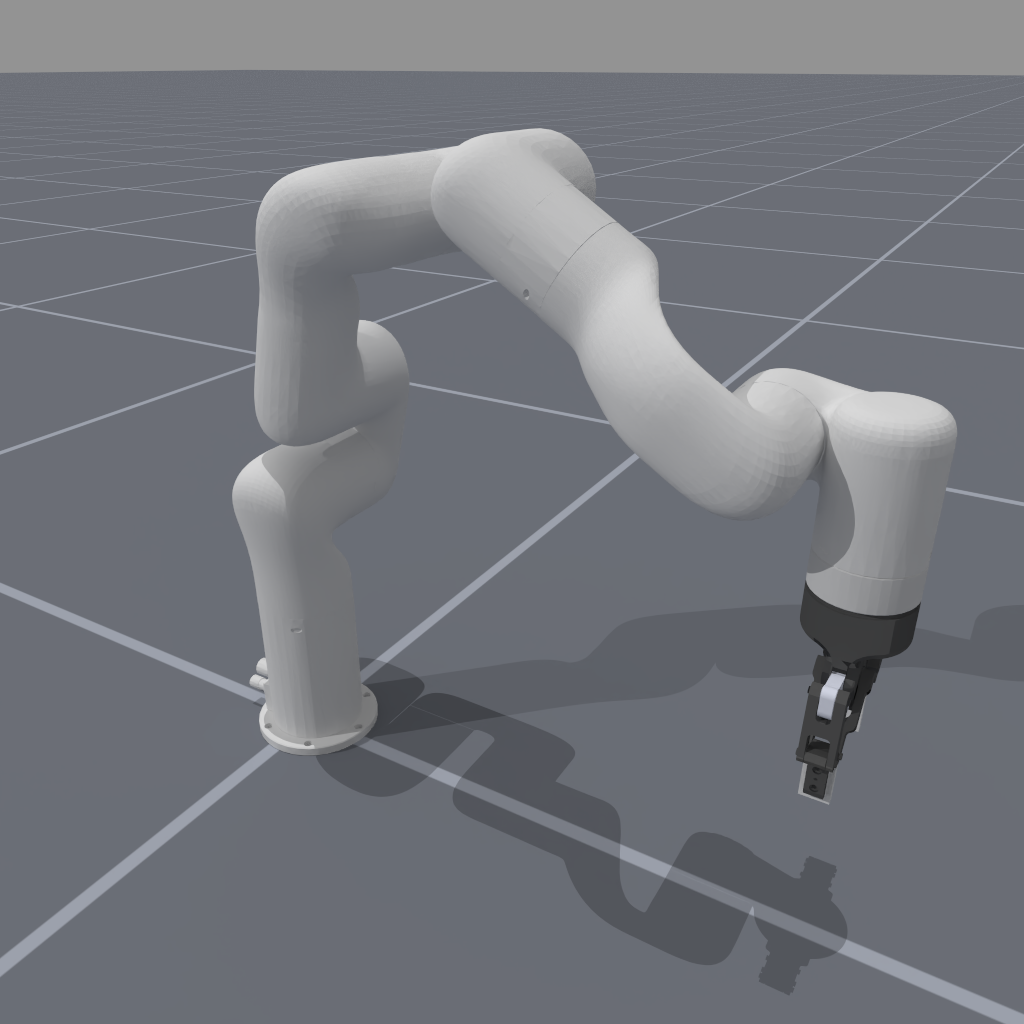
Visual Meshes
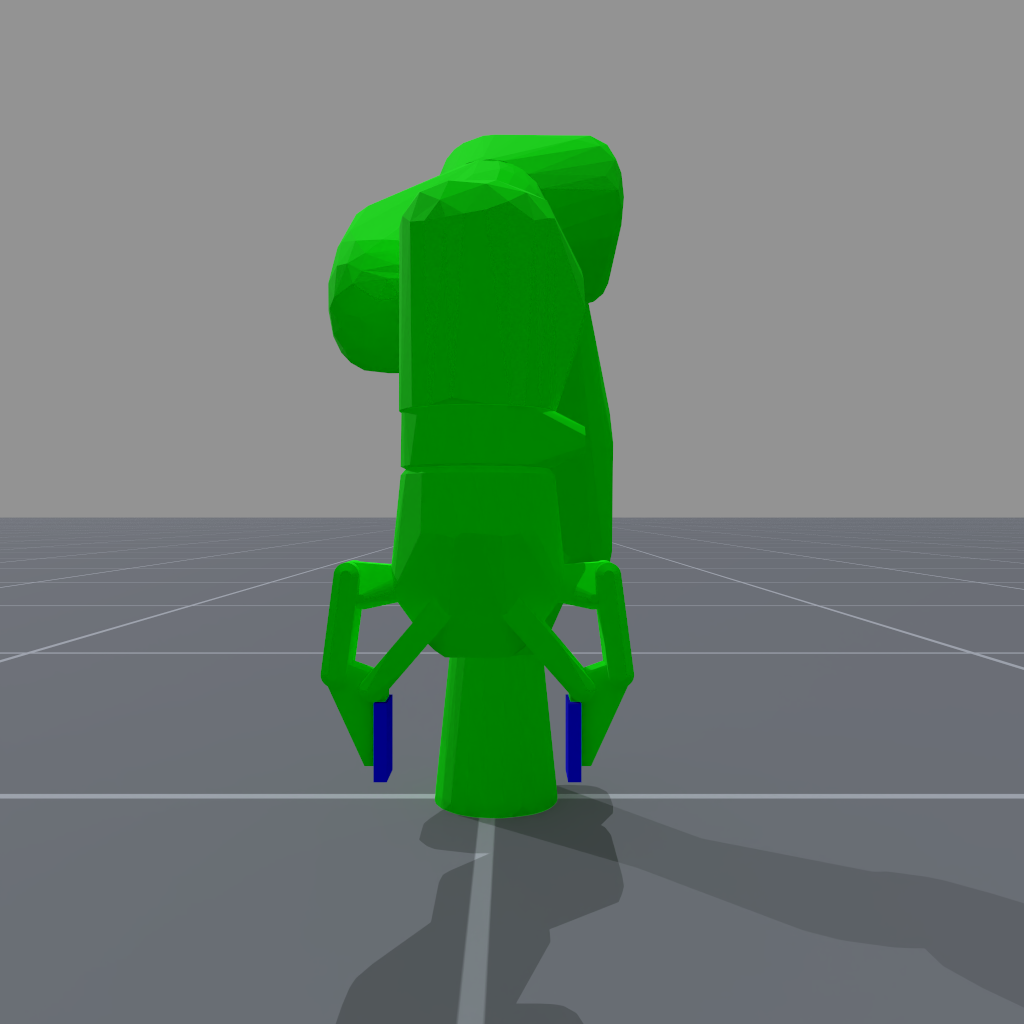
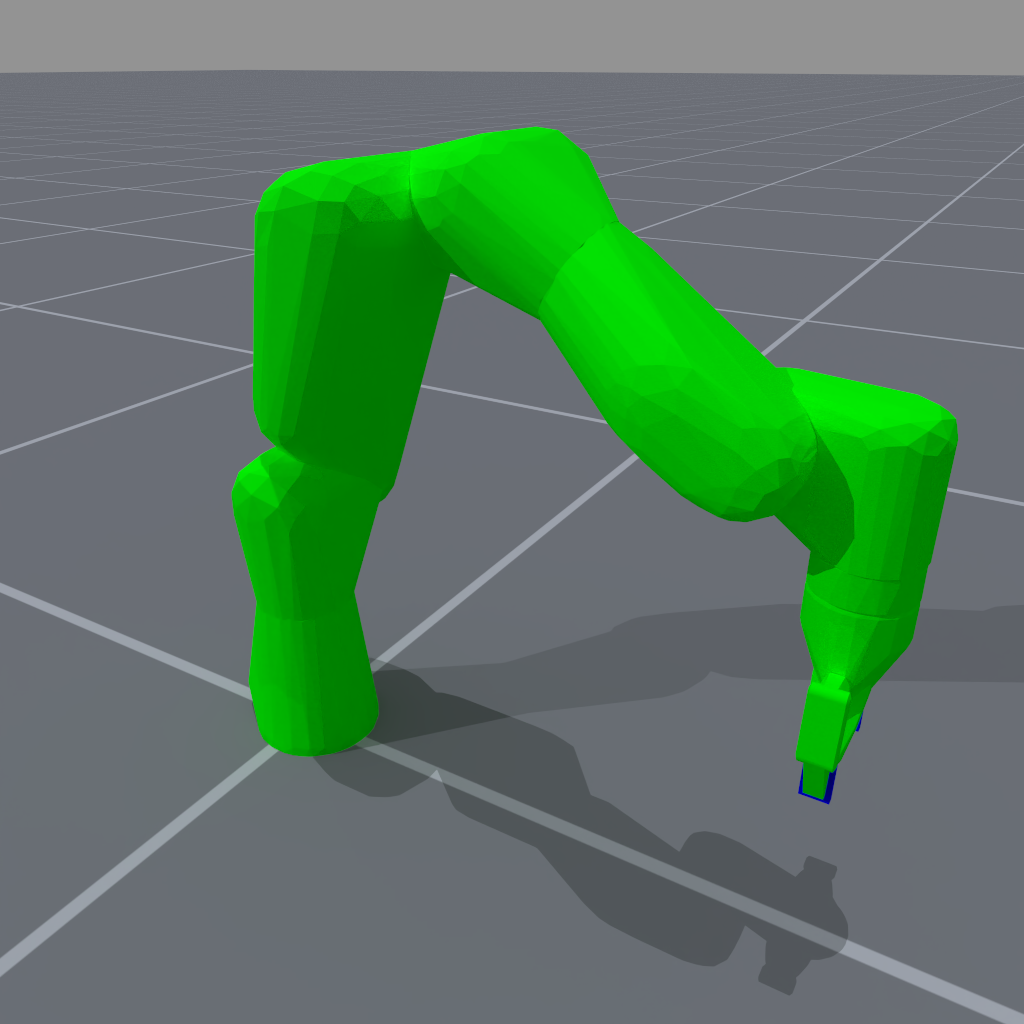
Collision Meshes (Green = Convex Mesh, Blue = Primitive Shape Mesh)